3D reconstruction with time-of-flight depth camera and multiple mirrors
Trong-Nguyen Nguyen, Huu-Hung Huynh and Jean Meunier
IEEE Access, IEEE, vol. 6, 2018
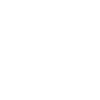
In order to extract more detailed features, many recent practical applications work with 3-D models instead of 2-D images. However, 3-D reconstruction usually requires either multiple cameras or a depth sensor and a turntable. This paper proposes an approach for performing a 3-D reconstruction using only one depth camera together with two or more mirrors. Mirrors are employed as virtual depth cameras placed at different positions. All measured depth data are provided in only one frame at each time. Significant depth distortion behind a mirror, which occurred with a standard time-of-flight depth sensor, is reduced by removing unreliable points and/or re-estimating better positions for these points. The experiments on easy-to-evaluate geometric objects show that the proposed approach could play a basic role in reconstructing intermediate 3-D object models in practical applications using only cheap devices.